Итак, получив посылку из Китая с набором комплектующих для сборки квадрокоптера у меня конечно же зачесались руки собрать всю конструкцию воедино! Даже несмотря на тот факт, что аккумулятор и аппаратура управления были ещё далеко в пути, а первый полёт без них всё равно был бы невозможен.
Итак, получив посылку из Китая с набором комплектующих для сборки квадрокоптера у меня конечно же зачесались руки собрать всю конструкцию воедино! Даже несмотря на тот факт, что аккумулятор и аппаратура управления были ещё далеко в пути, а первый полёт без них всё равно был бы невозможен.
Сам процесс сборки, и даже настройки мультикоптеров, в интернете изучен и описан энтузиастами почти понятно и подробно, в том числе на видео. Именно поэтому я не буду подробно рассматривать все мелкие шаги, а остановлюсь на тех моментах, которые мне показались неочевидными или заинтересовали меня.
Прибыла посылка в небольшой коробке, размером приблизительно с лист бумаги А4, толщиной около 5 сантиметров. На почте посылку подмяли и даже чем-то проткнули, но содержимое коробки при этом не пострадало.
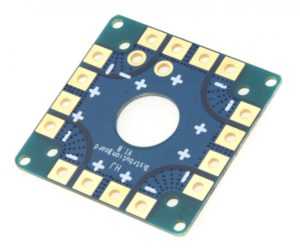
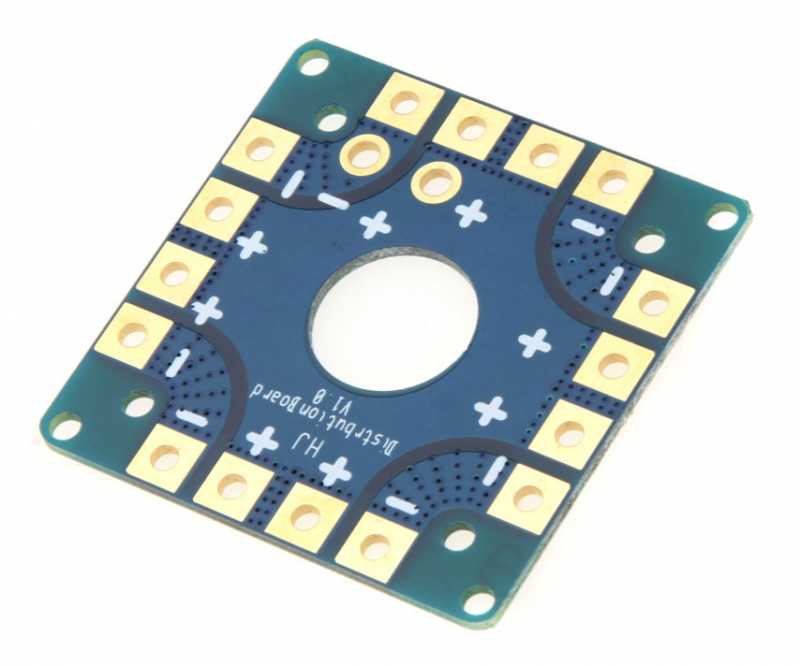
Дополнительная плата распределения питания из коробки
Начал я, по совету умудрённых опытом людей из интернета, с тех деталей, которые в последствии уберутся внутрь рамы: с разводки силовых проводов: от аккумулятора к четырём регуляторам оборотов двигателя. В коробке уже лежала специальная квадратная плата распределения питания, на которую можно аккуратно припаять все необходимые провода питания. Однако я решил ею не пользоваться, так как в нижней пластине рамы уже присутствует такая же разводка питания, а лишняя плата это лишний вес аппарата и лишняя деталь которая при вибрации может отвалиться и нарушить нормальную работу аппарата.
 Контакты на плате необходимо залудить и припаять к ней силовые провода, соблюдая их полярность, а именно: провода аккумулятора, и четыре регулятора оборотов двигателя.
Контакты на плате необходимо залудить и припаять к ней силовые провода, соблюдая их полярность, а именно: провода аккумулятора, и четыре регулятора оборотов двигателя.
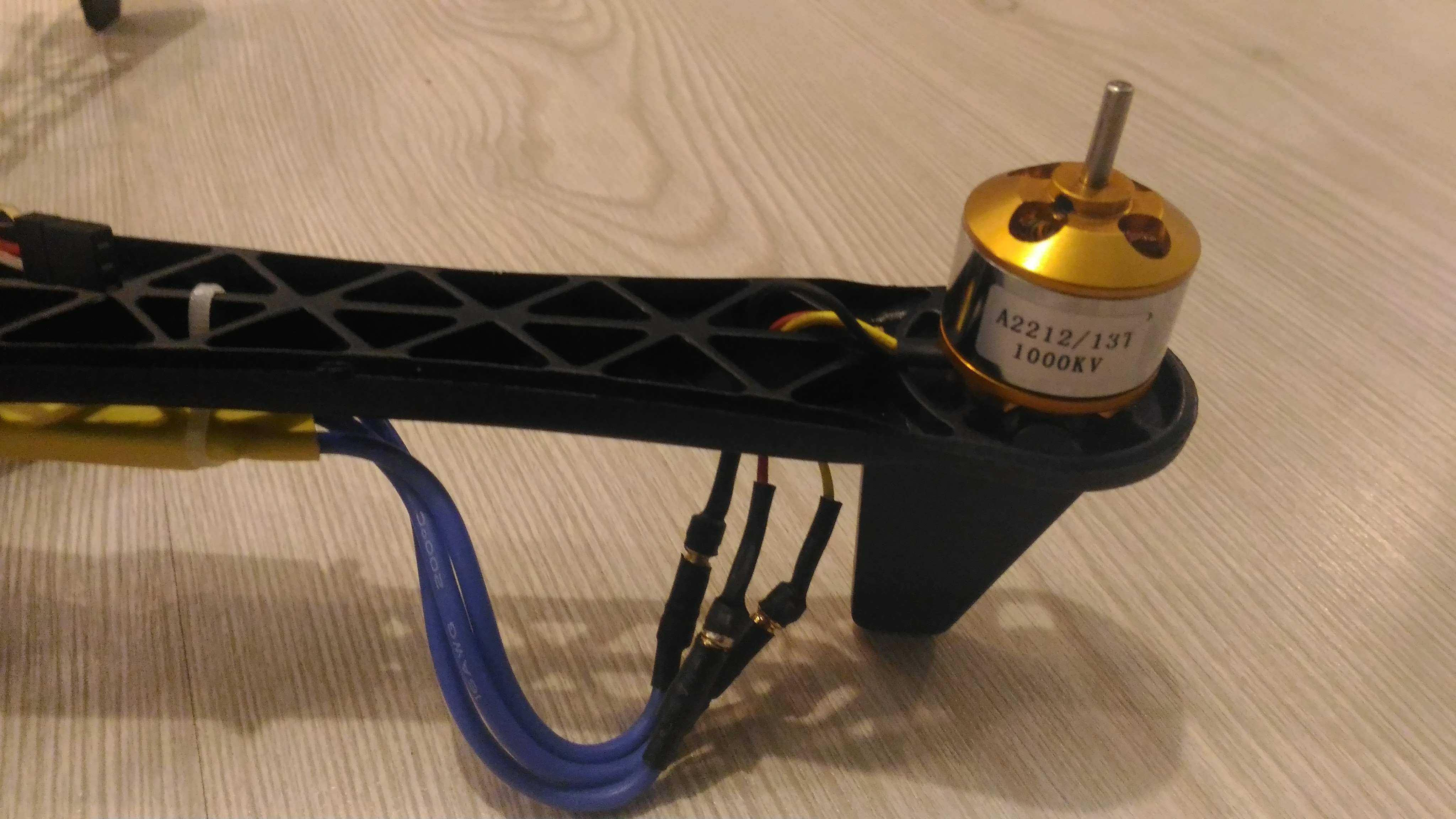
 Следующим шагом я собрал раму: прикрутил винтами лучи к нижней пластине, а затем к этой конструкции добавил верхнюю пластину рамы. Головки винтов оказались под довольно мелкий шестигранник, поэтому рекомендую заранее позаботиться о наличии инструмента. Далее, зачистил от облоев места установки двигателей на лучах и привинтил двигатели на места. Удивило, что крепёжные резьбовые отверстия на днище двигателя расположены не на одинаковом расстоянии от оси вращения!
Следующим шагом я собрал раму: прикрутил винтами лучи к нижней пластине, а затем к этой конструкции добавил верхнюю пластину рамы. Головки винтов оказались под довольно мелкий шестигранник, поэтому рекомендую заранее позаботиться о наличии инструмента. Далее, зачистил от облоев места установки двигателей на лучах и привинтил двигатели на места. Удивило, что крепёжные резьбовые отверстия на днище двигателя расположены не на одинаковом расстоянии от оси вращения!

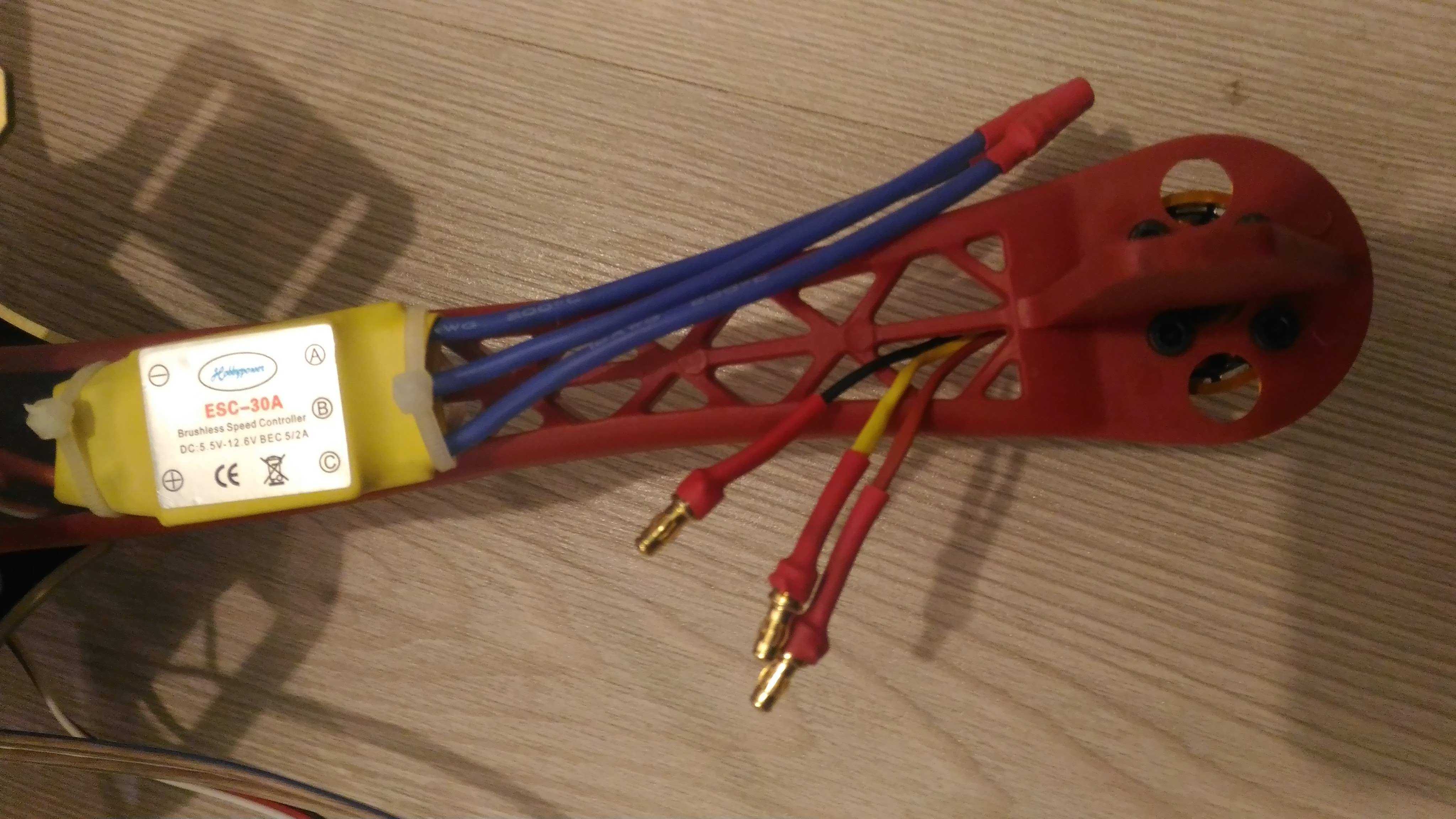
бананы
Отдельно пришлось задуматься о проблеме подключения двигателей к регуляторам оборотов. Среди владельцев квадрокоптеров есть сторонники двух способов этого соединения: пайка намертво, либо соединение на штекерах (в простонародии — бананы). Паяное соединение считается более надёжным, а на штекерах — более удобным в случае замены двигателя или сборки-разборки аппарата. Кроме этого, есть проблема стыковки проводов в этом соединении: из регуляторов выходит три провода с пометками A, B и C, а на входе двигателей есть три цветных провода: чёрный, красный и жёлтый. Как их соединять?
 Так вот! Подёргав пальцами соединение на «бананах», я бы не назвал их ненадёжными! Для их отключения пришлось применить ощутимую силу! А ещё такой способ соединения позволил легко поменять полярность неправильно подключенных двигателей! (а выяснить это можно только при включении аппарата). Проблемы же с изоляцией бананов были легко решены при помощи термоусадочных трубок.
Так вот! Подёргав пальцами соединение на «бананах», я бы не назвал их ненадёжными! Для их отключения пришлось применить ощутимую силу! А ещё такой способ соединения позволил легко поменять полярность неправильно подключенных двигателей! (а выяснить это можно только при включении аппарата). Проблемы же с изоляцией бананов были легко решены при помощи термоусадочных трубок.
 Из соображений балансировки всего аппарата, я старался размещать массивные детали как можно ближе к его геометрическому центру. Поэтому регуляторы оборотов (желтые детали на фото) я расположил не посредине луча, а ближе к площадкам рамы. А ещё, длина силовых проводов на регуляторах сделана с хорошим запасом, так что в вопросе взаимного расположения компонентов есть широкое поле для деятельности. Заранее обрезать провода впритык я не рискнул, побоялся что этот запас ещё понадобится. В результате получилось провисание излишка проводов, которые я стянул пластиковым хомутом, чтобы они не болтались и не попали в полёте в пропеллер. В дальнейшем, в случае удачного первого полёта, я планирую перепаять эти участки, убирая излишки проводов.
Из соображений балансировки всего аппарата, я старался размещать массивные детали как можно ближе к его геометрическому центру. Поэтому регуляторы оборотов (желтые детали на фото) я расположил не посредине луча, а ближе к площадкам рамы. А ещё, длина силовых проводов на регуляторах сделана с хорошим запасом, так что в вопросе взаимного расположения компонентов есть широкое поле для деятельности. Заранее обрезать провода впритык я не рискнул, побоялся что этот запас ещё понадобится. В результате получилось провисание излишка проводов, которые я стянул пластиковым хомутом, чтобы они не болтались и не попали в полёте в пропеллер. В дальнейшем, в случае удачного первого полёта, я планирую перепаять эти участки, убирая излишки проводов.
 Дальнейшая работа по сборке аппарата производилась в центре, в районе верхней пластины. Крепление модулей «Контроллер полёта» и «Компас+GPS» предусматривает наличие специальных площадок, однако при желании их можно приколхозить самостоятельно. Датчик Компас+GPS, например, должен крепиться выше основной электроники, чтобы она не влияла на показания датчика. За несколько долларов можно заказать специальную стойку для него, но я пошёл по другому пути: при помощи китайской палочки для еды, самореза, соды и суперклея была сделана стойка собственного производства!
Дальнейшая работа по сборке аппарата производилась в центре, в районе верхней пластины. Крепление модулей «Контроллер полёта» и «Компас+GPS» предусматривает наличие специальных площадок, однако при желании их можно приколхозить самостоятельно. Датчик Компас+GPS, например, должен крепиться выше основной электроники, чтобы она не влияла на показания датчика. За несколько долларов можно заказать специальную стойку для него, но я пошёл по другому пути: при помощи китайской палочки для еды, самореза, соды и суперклея была сделана стойка собственного производства!
Похожим образом была решена и проблема с полётным контроллером. Главная функции подставки под этот контроллер — гасить вибрации, сохраняя при этом горизонтальное положение контроллера относительно рамы аппарата. Найденный в интернете вариант крепления на нескольких слоях двухстороннего скотча оказался слишком жёстким. Поэтому было принято решение посадить его на поролоновую губку и притянуть сверху канцелярскими резинками (или резинки для денег, как их называют).
 Подключение всей электроники к контроллеру полёта особого интереса не вызывает, там всё просто. Минусовые контакты расположены по внешнему периметру контроллера. Приёмник аппаратуры управления закрепил на пластине рамы пластиковым хомутом.
Подключение всей электроники к контроллеру полёта особого интереса не вызывает, там всё просто. Минусовые контакты расположены по внешнему периметру контроллера. Приёмник аппаратуры управления закрепил на пластине рамы пластиковым хомутом.
С пропеллерами в комплекте идут шайбы разных размеров, которые позволяют им закрепиться на различных осях двигателей. Система крепления пропеллеров довольно проста, но пока не понятно почему на всех четырёх креплениях правая резьба. Неужели они не должны самостоятельно затягиваться?
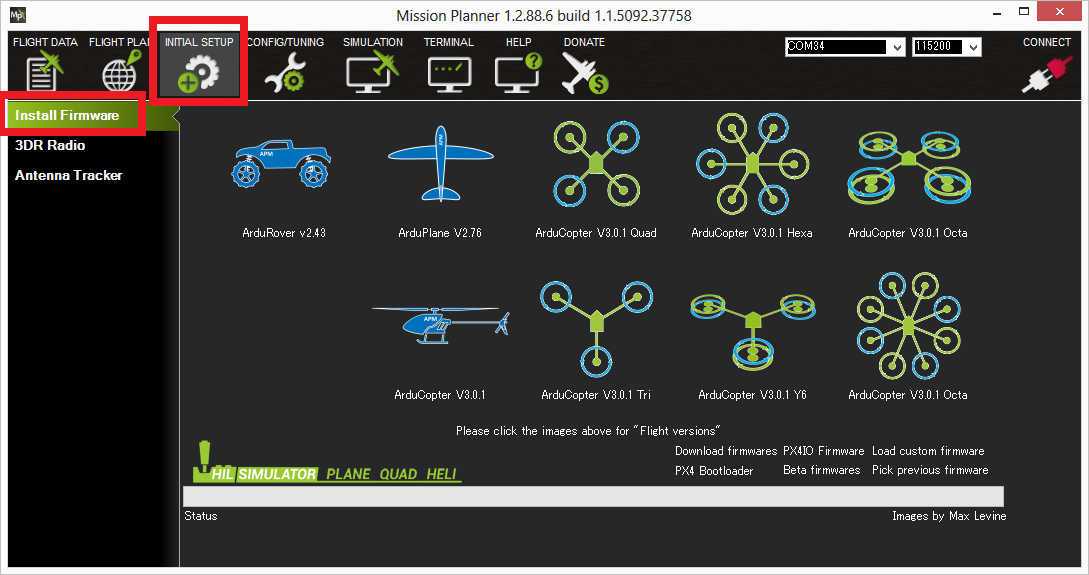
 Ну вот, по сборке вроде бы всё. Не знаю стоит ли расписывать процедуру настройки, она и так довольно широко представлена в интернетах. Скажу только для интересующихся, что всё производится при помощи программы Mission Planner. Она позволяет настраивать, калибровать и задавать маршруты нашему летательному аппарату. А её первые страницы дают понять, что базе этого контроллера можно построить не только квадрокоптер, но и совершенно разные летательные (и не только) аппараты!
Ну вот, по сборке вроде бы всё. Не знаю стоит ли расписывать процедуру настройки, она и так довольно широко представлена в интернетах. Скажу только для интересующихся, что всё производится при помощи программы Mission Planner. Она позволяет настраивать, калибровать и задавать маршруты нашему летательному аппарату. А её первые страницы дают понять, что базе этого контроллера можно построить не только квадрокоптер, но и совершенно разные летательные (и не только) аппараты!