Бе-200 «Альтаир» — российский самолёт-амфибия (летающая лодка), разработанный ТАНТК имени Г. М. Бериева и производимый на Иркутском авиационном заводе. В 2008 году производство Бе-200 перенесено на ТАНТК имени Г. М. Бериева.
Это хитрое название обозначает не менее хитрое устройство с тремя электродвигателями и управляющей ими платой. Главное назначение такого подвеса — успокаивать все колебания и раскачки квадрокоптера, чтобы они не влияли на положение видеокамеры в пространстве.
Иными словами, квадрокоптер в процессе полёта в любом случае наклоняется и поворачивается: для разгона, торможения, для поворотов, и даже для компенсации случайно появившегося ветра.
В подвесе есть датчик горизонта на верхней его части (основании) и такой же на нижней площадке (на которой держится камера). Сравнивая показания этих двух датчиков, подвес выравнивает положение нижней площадки с камерой.
Подвесы бывают двухосевые и трёхосевые. Двухосевые имеют только два двигателя для корректировки по двум осям: Pitch (наклоны вперёд-назад) и Roll (наклоны направо-налево). В трёхосевых подвесах добавляется ещё и двигател по оси Yaw (повороты вокруг вертикальной оси квадрокоптера).
Вот пример, как работает двухосевой подвес на столе:
Общепринято, что видео снятное при помощи трёхосевого подвеса не нуждается в дальнейшей видеообработке.
Но о качестве видео судить Вам, вот такое видео снято мною без особой подготовки: Съёмка зоны отдыха на Витьбе. Снято камерой EKEN H9R на подвесе HakRC Storm32:
Важное замечание: Подвес нельзя включать без камеры, точно так же как и передатчик FPV нельзя включать без антенны.
Лично я использовал трёхосевой подвес HakRC Storm32 — около 50$.
Вот как работает трёхосевой подвес:
Системы FPV
Аббревиатура FPV означает First Person Vision — изображение от первого лица. Оборудование этого класса позволяет пилоту управлять летательным аппаратам наблюдая за изображением с бортовой камеры в прямом эфире, то есть как будто он при этом находится на борту!
По сути комплект FPV состоит из воздушной и наземной части. На летательном аппарате размещается камера и передатчик, а на земле, соответственно, приёмник и экран (или шлем/очки).
Камеры бывают совмещённые в одном корпусе с передатчиком и отдельные. Так же и приёмники бывают отдельные от экранов и в одном корпусе. Разные формы антенн дают разные результаты в дальности передачи изображения.
OSD — показатели приборной панели на изображении
Аббревиатура OSD расшифровывается как On Screen Display. Прибор с таким названием накладывает на изображение FPV-камеры показатели приборов контроллера полётов. Наиболее важные из них — количество пойманных спутников, текущая высота, горизонтальная скорость, компас, остаток заряда батареи, географические широта и долгота и многие другие.
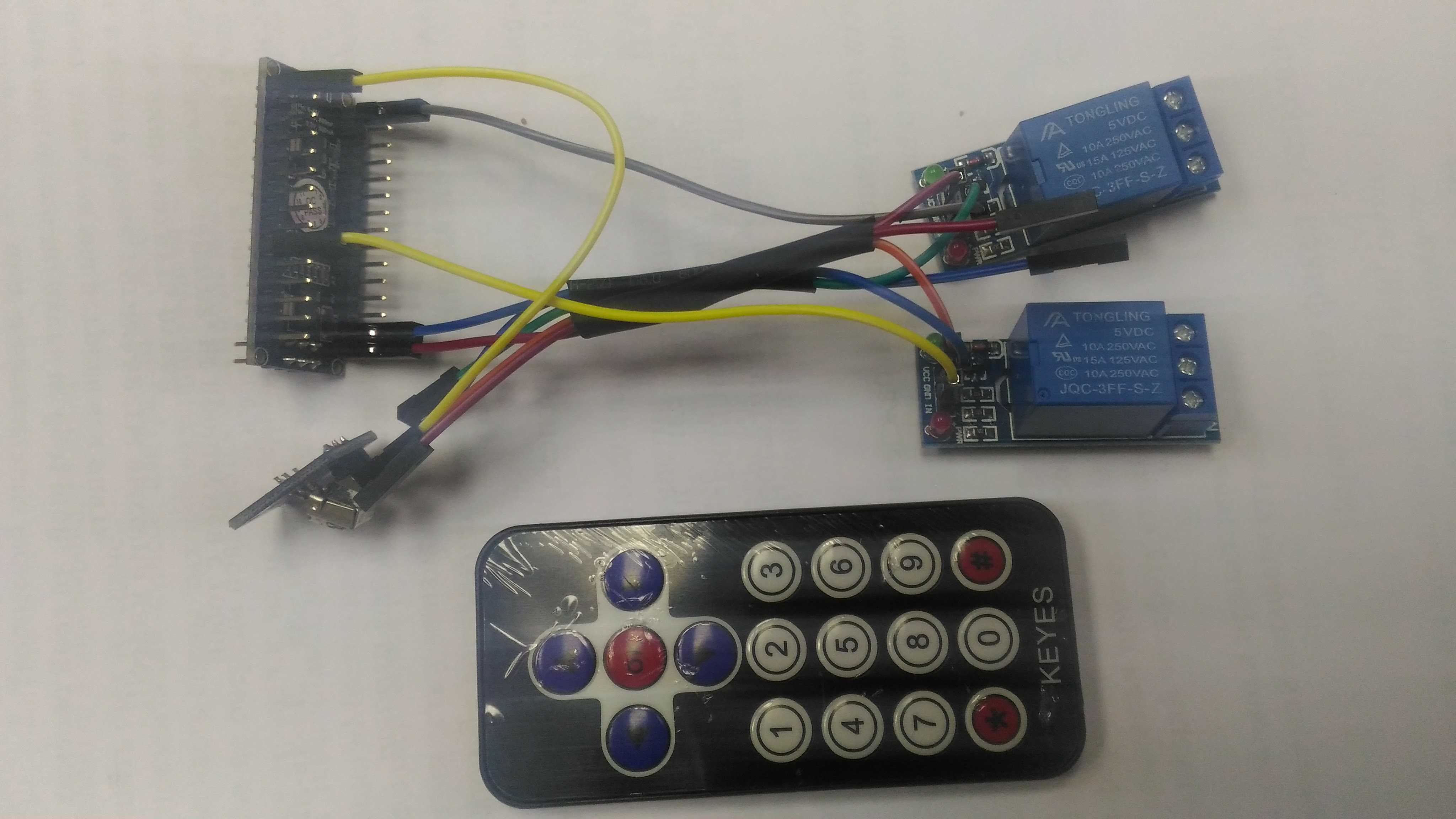
В одной из прошлых статей я описывал создание умного удлинителя, розетки которого можно было отдельно включать и выключать при помощи инфракрасного дистанционного пульта управления. Изделие в доме не очень-то пригодилось, а место занимало, поэтому было принято решение переделать и модернизировать это устройство. Переделать я его решил в умную люстру в детскую комнату, с тем же смыслом отдельного отключения лампочек. В комнате до этого стоял одноклавишный выключатель, так что умная люстра позволила бы более плавно регулировать освещённость в комнате, да и детишкам потеха!
Большая часть схемы в этом случае осталась без изменений: те же реле, те же провода, тот же скетч, по крайней мере с большего. Основных отличия было два:
Во-первых, нужен был источник питания. Конечно, у китайцев можно купить на любой вкус, но я поступил проще: разобрал старую зарядку от 220вольт на USB и выковырял оттуда плату! Получил стабильные 5 вольт!
Во-вторых, инфракрасный пульт дистанционного управления давал много ошибок, тем более его приёмник надо было незаметно спрятать у основания люстры. Поэтому я принял решение заменить инфракрасный пульт на радио. Удивительно, но приёмник инфракрасного пульта оказалось подключить так же легко, а обработать его сигналы — гораздо проще! С него просто приходили цифровые сигналы по четырём ногам, в зависимости от нажатия четырёх кнопок!
При программировании кнопок я немного позволил разгуляться своей фантазии, и запрограммировал такие действия:
Кнопка А — включение/выключение первой лампочки (первого реле)
Кнопка В — включение/выключение второй лампочки (второе реле)
Кнопка С — включение/выключение обеих лампочек сразу
Кнопка D — режим «светомузыка» — мигание поочерёдно обеими лампочками.
На этот раз я могу вам предоставить видео работы умной люстры!
Продолжая уже описанную тему, расскажу о своих успехах и неудачах в дальнейшей эксплуатации самодельной авиамодели, как и раньше, заостряя внимание только на нестандартных вещах, не описанных другими интернет-источниками.
Итак, собранный квадрокоптер был тщательно настроен при помощи Mission Planner, конечно не без нюансов (но о них позже) и вынесен в поле.
При первых двух запусках квадрокоптер не взлетал а просто падал на бок! В результате — поломанные пропеллеры и лучи рамы.
Заказанные из Китая детали ждать приходилось очень долго, поэтому заказывал я их заранее и в бОльшем количестве чем необходимо (про запас). Также, мне очень помогли ребята из студии 3D-печати 3DADA. Они печатали мне пропеллеры и лучи рамы, спасибо им за помощь!
Причину опрокидываний я искал очень долго. На первый взгляд ошибка могла быть в порядке подключения двигателей либо в расположении центрального контроллера полёта относительно носа летательного аппарата. Действительно, при наклоне квадрокоптера, например влево, контроллер полёта должен дать больше газа именно на два левых двигателя чтобы выровнять летательный аппарат. А при неправильном порядке подключения моторов повышенный газ пойдёт на неправильный двигатель, что и приведёт к перевороту аппарата. Такая же ситуация случится при неправильной ориентации полётного контроллера (именно в нём установлены гироскопы и акселерометры) относительно носа летательного аппарата: неправильно сориентированный контроллер не сможет правильно определить наклон аппарата.
Однако тщательные проверки показали что в этих двух позициях ошибок нет, и тщательный анализ видеозаписей полётов показал проблему:
Главная проблема — крепление пропеллеров
Дешевый безщёточный двигатель A2212 имеет на выходе гладкий вал, на который надевается крепление пропеллера.
Крепление имеет гладкую голову и очень трудно зажимается без дополнительных инструментов, а надёжность его крепления на валу напрямую зависит от силы зажатия. Кроме того, крепления всех четырёх пропеллеров одинаковые, с обычной правой резьбой, и зажимаются по часовой стрелке. А мы с вами помним, что на любом квадрокоптере есть две пары пропеллеров, вращающихся В РАЗНЫЕ стороны! Пропеллеры, вращающиеся против часовой стрелки своим вращением зажимают крепление ещё сильнее, а двигатели вращающиеся по часовой стрелке — стремятся раскрутить крепление.
И вот, в результате ослабления креплений левого переднего и правого заднего двигателя, пропеллеры проворачивались на валу и контроллер не мог выровнять аппарат в горизотальное положение! Результат — крен в сторону конкретного двигателя (луча), падение и крушение.
Ситуацию спас автомобильный фиксатор резьбы в тюбике и тонкая отвёртка для закручивания гайки. Правда это очень усложнило установку и съём пропеллеров, а это удобная функция для транспортировки аппарата.
Поиск по просторам интернета подсказал более качественное решение этой проблемы, но и более дорогое: Двигатели подороже не требуют отдельных креплений для пропеллеров, а имеют резьбу прямо на валу. Правую и левую соответственно. Также такие двигатели укомплектовываются гайками для зажима пропеллеров — с правой и левой резьбой.
Проблема 2 — компас
При настройке полётного контроллера одним из необходимых этапов является калибровка компаса. Повторять этот этап крайне рекомендуется перед полётами в каждой новой местности, а может даже и перед каждым полётом. При неправильной калибровке компаса невозможно корректное использование GPS, возможны проблемы «унитазинг» (движение по кругу вместо удержания точки) или «улёт в китай» (резкое движение в непредсказуемом направлении вместо удержания точки).
Дело в том, что все попытки скалибровать компас заканчивались сообщением об ошибке «Setting new offsets for compas #1 failed». Замена компаса и центрального полётного контроллера не помогли. Однако было замечено, что несмотря на эту ошибку, новые значения оффсетов всё-таки прописывались в память устройства.
Доработки.
Постепенно все приколхоженные самостоятельно крепления были заменены на заказные, заботливо изготовленные китайцами, также двигатели были заменены на новые, но об этих улучшениях пожалуй расскажу в следующей статье.
Продолжая тему Arduino, мне захотелось сделать не робота и не игрушку а что-либо полезное в домашнем хозяйстве. Контроллер Ардуино, подключенный через модули реле способен управлять даже высоковольтными проводами.
Этот факт натолкнул меня на мысль создать «умный удлиннитель» — эдакий блок розеток, позволяющий включать и выключать отдельные розетки (а значит и электроприборы, включенные в них) на расстоянии, при помощи пульта дистанционного управления. Итак, поехали!
Список необходимых деталей со ссылками для заказа:
Контроллер Arduino Nano
Для уменьшения размера конструкции, а также с целью удешевления конструкции был выбран именно Nano. Чтобы по неосторожности не испортить контроллер, заказал Arduino Nano сразу с припаянными ногами. Цена 2,49$ плюс 1.68$ доставка
Реле
Модули реле заказал по цене 0.53$ за штуку, плюс доставка 1.39$ за пакет.
Нужно заказать столько штук, сколько розеток надо подключить. В моём случае две.
ИК-пульт с приёмником
Модуль приёмника инфракрасного пульта и сам пульт в одном лоте заказал по цене 0,78$ плюс 1,8$ за доставку. В комплекте есть три соединительных провода и запасной фотодиод. Пульт питается от батарейки CR2025, но в комплект батарейка не входит! Купите батарейку отдельно!
Была мысль использовать вместо инфракрасного пульта пульт-радиопередатчик со своим модулем-радиоприёмником, но во-первых он дороже, во-вторых, сложнее в подключении. А главное — я собирался в будущем использовать несколько таких удлиннителей в разных комнатах квартиры. И в этом случае нажатый радио-пульт в одной комнате включал бы розетки во всех комнатах квартиры! Конечно таких случайностей допускать нельзя.
Дополнительно
Я не стал учитывать стоимость соединительных проводов. Поштучно они не продаются, но есть разные наборы по разным ценам, а для сборки этого устройства понадобится гораздо меньше чем целый набор. Тем более всегда есть способ сэкономить и приколхозить свои провода!
Также у меня в настоящий момент нет в наличии модулей питания, преобразующих 220 вольт в необходимые для Ардуино 5 вольт. Поэтому на первое время я решил питать всю схему при помощи обычной зарядки для смартфона, через гнездо Micro-USB. Соответственно, и цену модуля питания в первой версии статьи я не учитываю.
Ну и пока не включал цену самих розеток и силовых проводов, необходимых для сборки самого удлиннителя. Их стоимость в магазинах вашего города может отличаться, да и опять же, под рукой могут найтись и старые.
Общие расходы
Общая стоимость деталей — 4,33$, доставки — 4,87$
Итого вместе с доставкой – 9,2$.
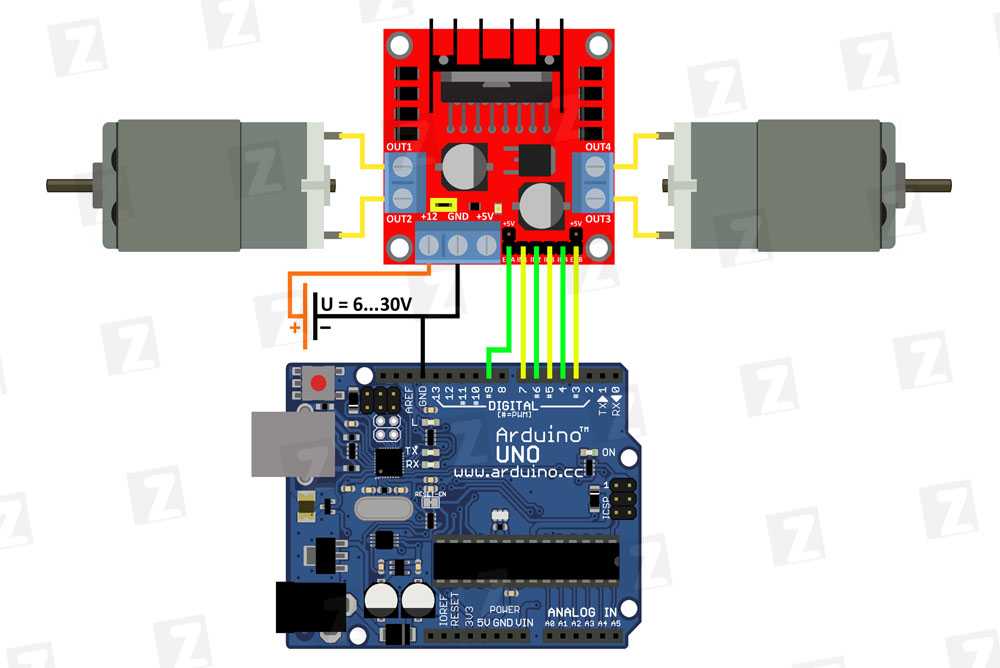
Подключение
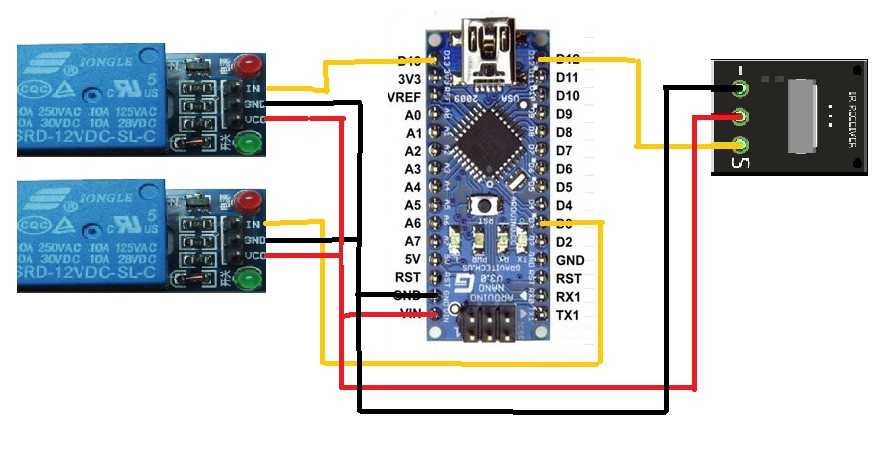
Подключал я по следующей схеме. Провода чёрного цвета — земля, красного — +5вольт, жёлтые провода — сигнальные. Справа от контроллера — приёмник ИК-пульта, слева — реле.
Внимательно читайте надписи на контактах при подключении компонентов! Расположение контактов на ваших модулях может отличаться
Все компоненты питаются от одних и тех же проводов земля и +5вольт. Сигнальные провода реле нужно подключать к цифровым ногам 3 и 13, приёмник пульта — к 12.
ВНИМАНИЕ!
После полевых испытаний на схеме обнаружилась ОШИБКА! Плюсовой провод на плате нужно подключать к Ардуино не на ногу VIN а на ногу 5V!
Галерея
Скетч
const int rele1 = 3; // Реле подключены на ноги 3 и 13
const int rele2 = 13;
int RECV_PIN = 12; // Приёмник ИК-пульта подключен на ногу 12
#include <IRremote.h>
long i= 0;
int pos1= 0; // Начальные положения обеих релюшек — выключено
int pos2= 0;
IRrecv irrecv(RECV_PIN); //Создаем объект получения сигнала с определенного порта
decode_results results; //Переменная, хранящая результат
void setup()
{
pinMode(rele1, OUTPUT);
pinMode(rele2, OUTPUT);
Serial.begin(9600);
irrecv.enableIRIn(); // Начинаем прием ИК-сигналов
digitalWrite(rele1, HIGH); // Выключаем релюшки
digitalWrite(rele2, HIGH);
}
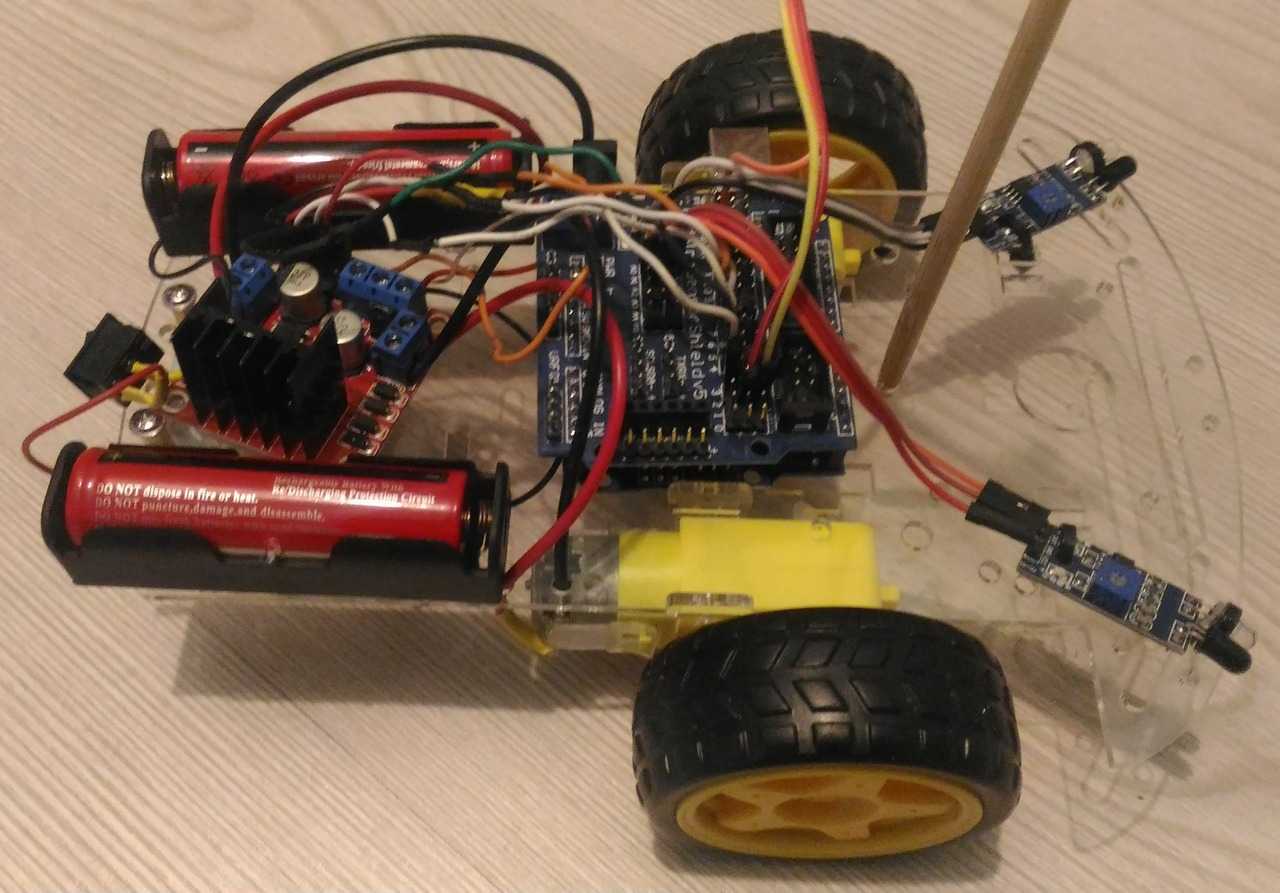
На выходных я получил из Китая очередную посылку с модулями для Arduino, и сразу же захотел применить их для уже знакомого нам робота-автомобиля. Тем более, что две попытки взлёта квадрокоптера обернулись неудачей и до прибытия новых пропеллеров работы по нему всё равно приостановлены.
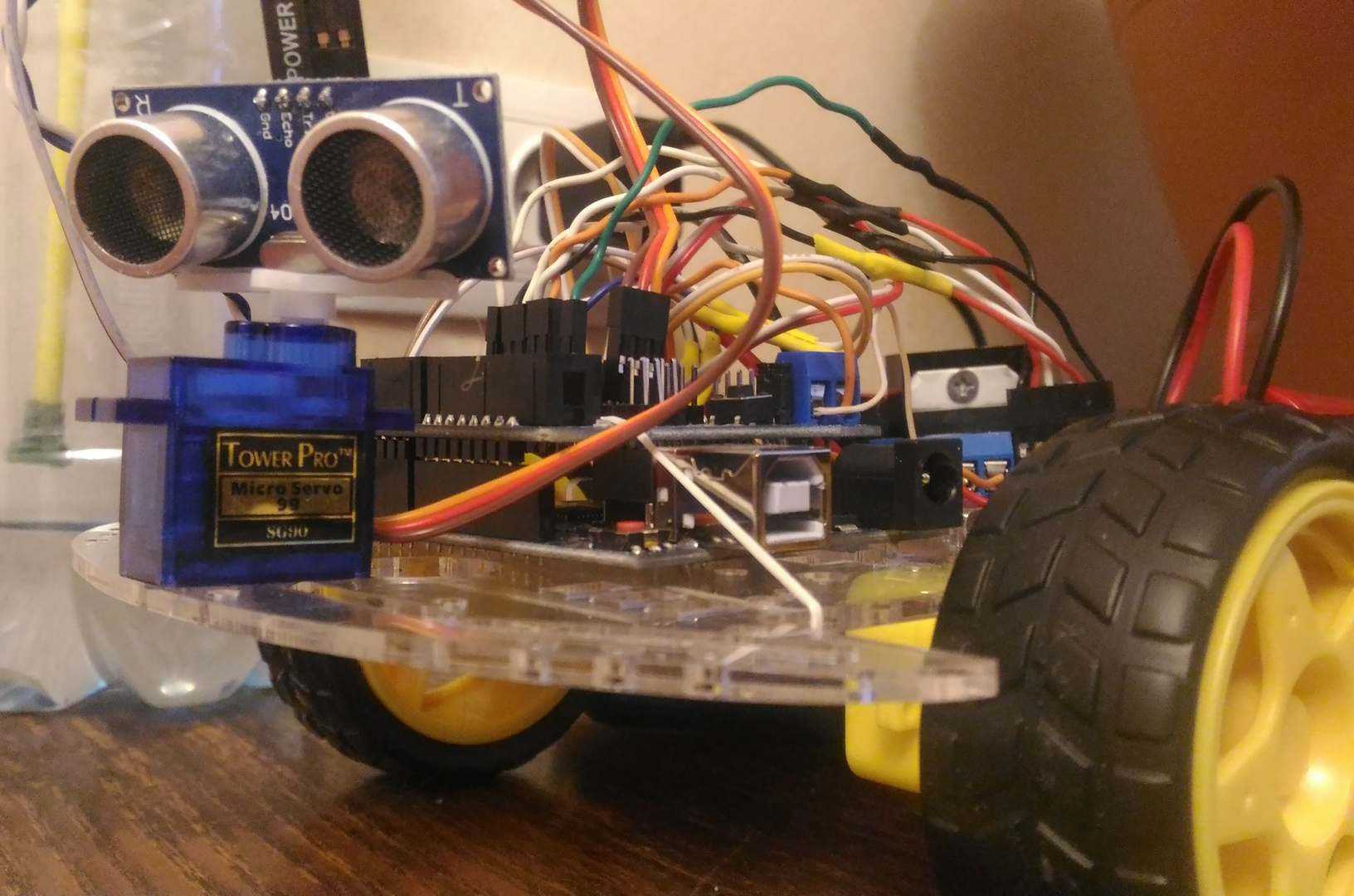
При последней сборке робот-автомобиль анализировал окружающую его обстановку при помощи ультразвукового датчика-дальномера, который крепился на валу сервомотора, позволяющего поворачивать его влево и вправо. Конструкция получилась смешная, но робот часто утыкался носом в препятствия не замечая их. Ультразвуковой датчик тратил относительно много времени на замеры и слишком часто ошибался.
На замену ему были заказаны Инфракрасные датчики приближения! Цена из совсем смешная (меньше доллара), правда пришлось добавить ещё около двух долларов на стоимость доставки. Приехали довольно быстро, каждый датчик был запаян в отдельный метализированный пакет. У некоторых были слегка погнуты светодиоды (как на фото), но они легко выпрямились пальцами.
Принцип действия инфракрасного датчика приближения
При подаче питания на датчик сразу включается инфракрасный светодиод (прозрачный на фото). Он работает непрерывно, всё время работы датчика. Инфракрасное свечение совершенно незаметно для человеческого глаза, однако хорошо видно через любую цифровую камеру (например, мобильного телефона).
При наличии в зоне свечения светодиода препятствия (примерно на расстоянии 5-10 сантиметров), свет отражается и принимается фотодиодом (чёрный на фото).
Дополнительно, на плате датчика я заметил два светодиода красного цвета, которые очень помогают в настройке робота:
первый светится всё время работы датчика, свидетельствует о наличии питания на плате и о работе инфракрасного светодиода.
второй светится только при наличии в зоне действия ИК-светодиода освещённого им препятствия. Очень помогает визуально без дополнительных инструментов определить, сработал датчик или нет.
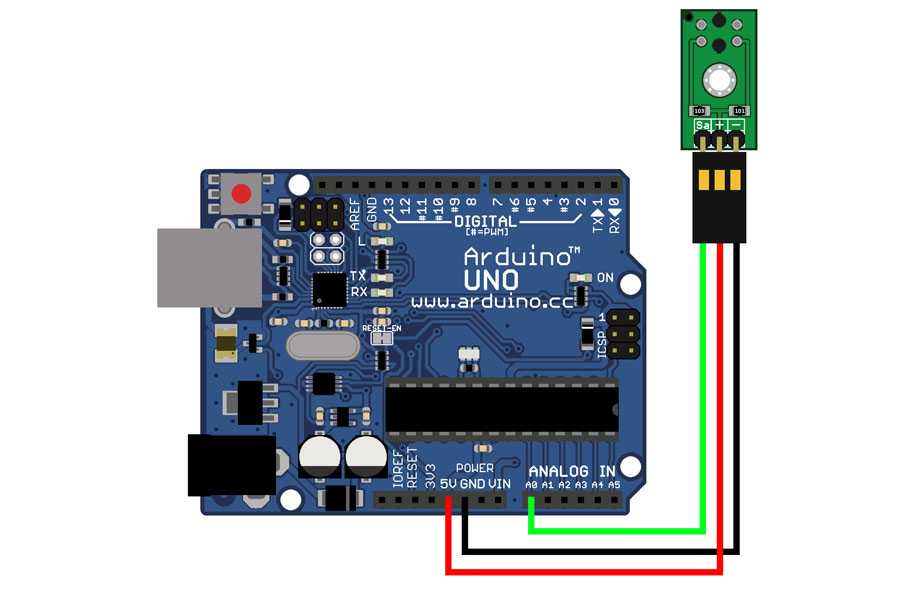
Подключение и настройка
На датчике три контакта:
VCC (питание, +5 вольт)
GND (земля, минусовой провод)
OUT (выход, сигнал, информация о наличии препятствия).
Обратите внимание, порядок контактов на схеме подключения и на самом модуле (фото выше) отличается. При подключении внимательно читайте надписи на контактах!
При подключении модулей к контроллеру Arduino я стараюсь не пользоваться паяльником. Во-первых есть риск перегреть и сжечь дорогую электронику, во-вторых компоненты Arduino как правило многократно собираются и разбираются в различных комбинациях, а многократная пайка портит детали. Для решения этой проблемы я заказал недорогой комплект соединительных проводов трёх типов (мама-мама, мама-папа и папа-папа). Провода удобные, яркие, соединены между собой некрепко — можно оторвать нужное количество. Использовал только провода мама-мама, и столкнулся с необычайной жесткостью разьёмов. Чтобы надеть их на контакт, нужно приложить силу, достаточную для изгиба контакта, так что надевать их нужно очень осторожно. Ранее я использовал самопайные соединительные провода, сделанные из обрывков проводов со штекерами со старых компьютерных системных блоков (лампочки Power, HDD, кнопки Power, Reset, подключаемые от корпуса на материнскую плату). Вот с ними никаких проблем — надеваются и снимаются легко!
Закрепил я датчики на борту робомобиля в передней части корпуса, слева и справа от центра, чтобы робот по-разному реагировал на препятствия с разных сторон.
Итоги
При аналогичной скорости передвижения робот стал заметно умнее! Стал обнаруживать препятствия чётче, хоть и на меньшем расстоянии.
Однако был замечен глюк при очень ярком освещении (солнечный свет через окно). В этом случае датчики постоянно получали освещение и постоянно считали что препятствие перед автомобилем существует.
Фотогалерея
На деревянную «мачту» на платформе не обращайте внимания — это я пытался закрепить на высоте приёмник от инфракрасного пульта управления, но об этом — в следующей статье!
Текст программы управления:
int IN1 = 7; // Input1 моторшилда подключен к выводу 7
int IN2 = 6;
int IN3 = 5;
int IN4 = 4;
int EN1 = 8; //9
int EN2 = 3;
int i;
const int LeftIK = 0;
const int RightIK = 1;
Для компьютера — программа, Для смартфона — приложение, Для ардуино — скетч
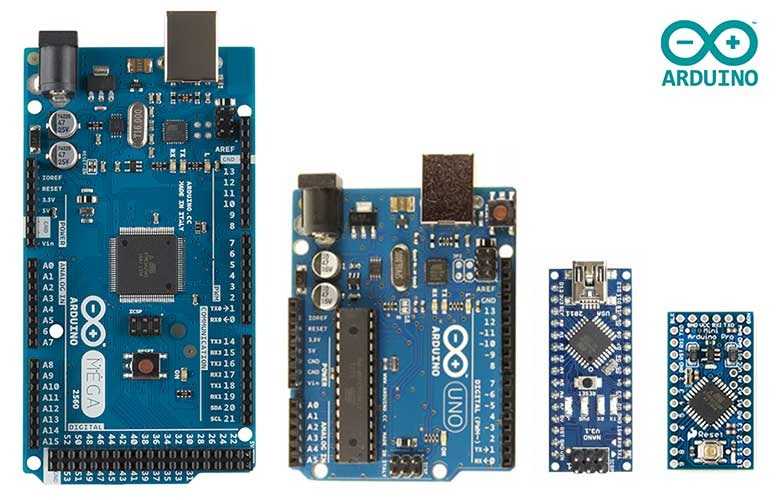
В процессе сборки квадрокоптераF450 я удивлялся, как маленькая электронная плата может успевать получать данные, поступающие от всех датчиков (пульт управления, гироскопы, акселерометры, барометр, компас и GPS), обрабатывать их и на их основании управлять тягой каждого из моторов в отдельности, не давая при этом аппарату опрокинуться и заставляя его перемещаься в нужную точку! Оказывается вполне даже может, т.к. собран его полётный контроллер на базе микроконтроллера Arduino Mega.
Что же такое Arduino — можно почитать в отдельной старой статье, а если вкратце — это микроконтроллер — печатная плата со своим процессором и памятью, к которой можно подключить множество устройств (датчики, модули, сенсоры, сервоприводы, двигатели, реле, другие контроллеры и т.д.), а затем при помощи особой программной среды (IDE) задать ему программу — посделовательность действий при определённых условиях.
Прибыл набор довольно быстро, на таможне вопросов не вызвал. В комплекте обнаружились:
Детали для сборки шасси — рама, винты, гайки.
Два желтых двигателя с понижающими редукторами, два жёлтых колеса для них
Третье колесо-ролик на подшипнике, свободно поворачивающееся в любую сторону
Контроллер Arduino Uno (большая синяя на фото)
Короткий USB-шнур для подключения Arduino к компьютеру
Плата-щит Sensor Shied 5.0 для более удобного подключения проводов к контроллеру (зелёная плата на фото)
Плата-драйвер для подключения моторов L298 (красная на фото)
Ультразвуковой дальномер (синяя маленькая плата с двумя круглыми деталями)
Сервомотор (синяя деталь с мотком провода) и комплект насадок для него
Контейнер для четырёх AAA-батареек (батареек в комплекте нет)
Поворотный кронштейн с местами под сервопривод
Выключатель
Краткая инструкция на китайском языке с картинками для сборки ШАССИ!
специальные провода для соединения компонентов Arduino
Несмотря на такую обширную комплектацию, это всё же не полный набор необходимых для сборки деталей. И я сейчас говорю не про батарейки! Прежде всего очень не хватает соединительных проводов. Нет, конечно обычные куски проводов можно найти даже на стройрынке, но сейчас я говорю о проводах со специальными штекерами на концах, для соединения компонентов Arduino между собой. Конечно кто-то может со мной поспорить, что всё можно соединить и при помощи паяльника если бы не два но: Во-первых, такую тонкую электронику нужно паять очень аккуратно, а это непросто. Во-вторых, в процессе сборки и настройки иногда возникает необходимость подключить провода по-другому, или просто отключить, а многократная пайка, пусть даже аккуратная на пользу платам не пойдёт. Также в комплекте не нашлось штекера питания самого контроллера, но я решил эту проблему по-своему…
Сборка
Итак, двигатели и колёса были прикручены довольно быстро, провода к двигателям были припаяны. Подразумевается что автомобиль должен передвигаться за счёт двух ведущих колёс, поворачивать за счёт их разницы в скорости, а третье поворотное колесо просто волочится сзади и даёт опору хвостовой части машины. Дальше работа стала, в связи с полной неизученностью электронной части набора.
Совсем немного поискав по интернету, я нашёл, скачал и установил среду программирования IDE, однако при подключении через USB компьютер увидел только «неизвестное устройство». Ещё немного танцев с бубном, поиск по интернету, скачивание определённого драйвера и вот, устройство появилось в системе в видео последовательного порта COM10.
Cхема подключения двух двигателей
Самой первой, и наверное, самой сложной задачей явилось подключение двигателей. Подключение по задумке китайцев должно происходить через плату MotorShield (драйвер двигателей) L298. Это позволит разделить цепь питания самого контроллера Arduino (стабильные 5вольт, а если через круглый штекер, то до 9вольт) от цепи питания двигателей (до 30 вольт). Наши двигатели способны питаться от напряжения от 3 до 12вольт, так что наш контейнер батареек выдающий 6 вольт вполне подходит. Схему подключения двигателей я нашёл на сайте Zelectro.cc (не забудьте снять две перемычки с красной платы!), там же пример программы для управления двигателями. Дальше было подключено питание к самому контроллеру, и вот, автомобиль уже поехал по ковру! Беспорядочно… вернее не оценивая окружающую обстановку, вращал поочерёдно каждым колесом сначала вперёд, затем назад! И это уже был первый успех которому я радовался как ребёнок!
Вторым этапом, поверх контроллера был установлен щит SensorShield 5.0 по принципу бутерброда. Штекера расположены таким образом, что ошибиться в установке трудно, если конечно не применять медвежью силу.
Плата управления двигателя была подключена на контакты щита с теми же номерами, здесь особого супер-удобства я ощутить не успел. А вот в дальнейшем, когда я подключал ультразвуковой дальномер и сервомотор, то я оценил отсутствие лишних проводов питание и земли, тянущихся в другой конец платы. Всё было подключено стандартными штекерами за соседние ножки. Собирать кронштейн для сервомотора я не стал, посчитал его лишней деталью. Сам сервомотор я укрепил на шасси, а затем ультразвуковой датчик закрепил на валу сервомотора при помощи всем известного термопистолета и клея «горячие сопли».
Отдельно приводить программу управления каждым устройством в отдельности не буду, без труда найдёте их на zelectro.cc, лучше я не напишу. А вот полную получившуюся программу приведу. Она заставляет машину ехать вперёд, постоянно вращая «головой» (дальномером) и определяя, есть ли препятствия справа и слева по ходу движения. И в случае обнаружения препятствия машинка останавливается, и для разворота вращает назад одно из колёс — либо правое либо левое, смотря с какой стороны обнаружено препятствие.
Итоги
Бегает автомобильчик довольно резво и весело, но как работает ультразвуковой сенсор мне не понравилось. Иногда не замечает мягких препятствий (подушка или мягкое кресло) и просто утыкается в них носом. Поэтому на будущее я заказал несколько инфракрасных датчиков, чтобы определение препятствий происходило оптическим путём. Также заказал инфракрасный пульт с приёмником — хочу заставить робота подчиняться командам с пульта!
А вообще — пробуйте, собирайте, программируйте, и придумывайте свои схемы взаимодействия электронных компонентов! Его возможности ограничиваются только вашей фантазией!
А теперь, обещанный текст программы:
#include <Servo.h>
Servo myservo;
int IN1 = 7; // Input1 моторшилда подключен к выводу 7
int IN2 = 6;
int IN3 = 5;
int IN4 = 4
int EN1 = 8; //9
int EN2 = 3;
int i;
#define Trig A0
#define Echo A1
// #define ledPin 13
if ((dist1>30) and (dist3>30))
{
// digitalWrite(ledPin, LOW);
digitalWrite (IN2, HIGH);
digitalWrite (IN1, LOW);
digitalWrite (IN4, HIGH);
digitalWrite (IN3, LOW);
analogWrite(EN1, 130); // Правое
analogWrite(EN2, 180); // ЛЕВОЕ
delay(100);
}
delay(100);
/* ждем 0.1 секунды, Следующий импульс может быть излучён, только после исчезновения эха от предыдущего.
Это время называется периодом цикла (cycle period).
Рекомендованный период между импульсами должен быть не менее 50 мс. */
}
Итак, для самостоятельной сборки квадрокоптера на раме F450 мы уже выбрали и заказали комплектующие, а также изучили список недостающих деталей. Сегодня поговорим о не менее необходимой вещи для любой радиоуправляемой модели, а именно — об аппаратуре управления, или о пульте.
Кстати, летательный аппарат нашего уровня, управляемый мини-компьютером на базе
Arduino, может летать и без пульта управления, по заранее запрограммированному маршруту! Но для этапа настройки, калибровки пульт всё равно не обходим. Профессиональные моделисты называют пульт просто — аппаратура.
После долгих поисков по интернету, было решено заказывать один из самых популярных, и одновременно с этим недорогих моделей: FlySky FS-i6. Заказывать я решил у того же продавца что и остальной комплект деталей. Комплект обошёлся мне около 45$.
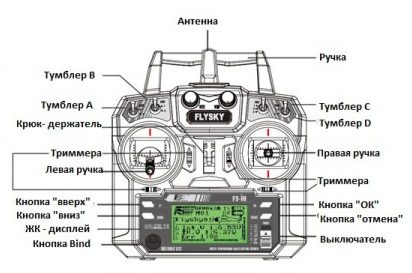
Передатчик
Передатчик 6-канальный. Четыре канала (два стика перемещаются в двух плоскостях) используются для полёта, ещё два для дополнительных функций. Питается от обычных пальчиковых батареек типа АА (в комплект поставки не входят). ЖК-дисплей и дополнительные кнопки позволяют оперировать тонкими настройками, в том числе связи пульта и приёмника.
Приёмник
Как правило такие комплекты аппаратуры управления включают в себя и приёмник, просто необходимый для управления летательным аппаратом. Но всё же убедитесь что в конкретном наборе он присутствует!
Мне достался приёмник FS-IA6. Он представляет собой небольшой блок с кучей контактов и двумя длинными проводами сбоку, и именно этот модуль устанавливается на борт квадрокоптера для получения сигналов с пульта управления. Контакты служат для подключения приёмника к контроллеру полёта. Существует несколько схем подключения (я знаю три) но самый простой — это последовательное подключение каждого канала (ряд из трёх контактов). Каждый канал приёмника соединяется с аналогичным входом контроллера полёта.А два боковых провода являются попросту антеннами приёмника.
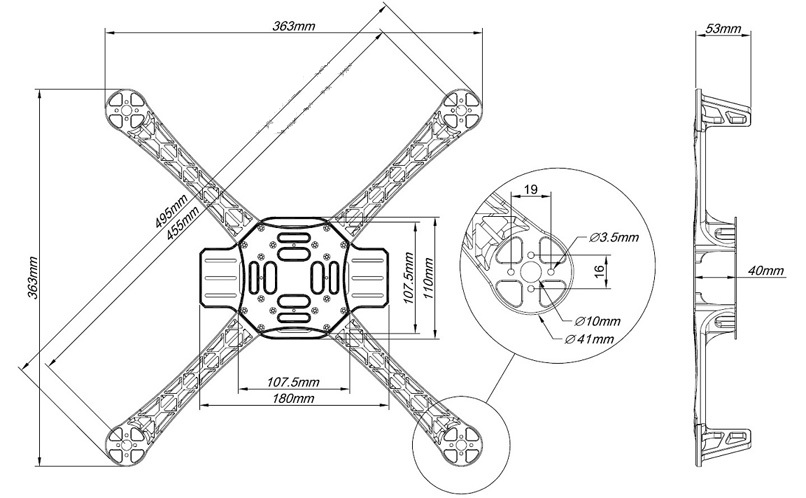
Итак, после долгих раздумий и выборов, а также основываюсь на уже имеющихся знаний о квадрокоптерах, мною было принято решение собирать кастомный квадрокоптер на базе рамы F450.
F450 — это популярная рама для сборки квадрокоптеров с расстоянием между диагонально расположенными двигателями примерно 450мм. Рама состоит из двух текстолитовых площадок и четырёх пластиковых лучей, присоединяемых к площадкам.
Верхняя площадка также имеет дорожки, как на печатной плате, предназначенные для разводки силовых проводов питания всего механизма.
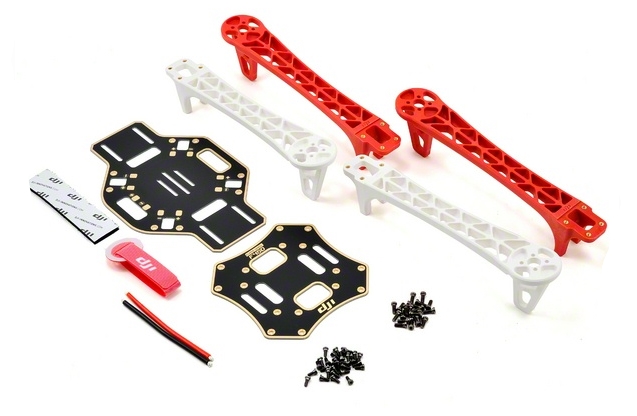
На Алиэкспрессе мне на глаза очень удачно попался готовый набор для сборки квадрокоптера, который я сразу же заказал! Цена набора в районе 80$. Набор правда не совсем полный, но недостающие вещи более-менее понятны и доступны к отдельному заказу.
Набор состоит из следующих компонентов:
Рама
Площадки, лучи, винты для сборки
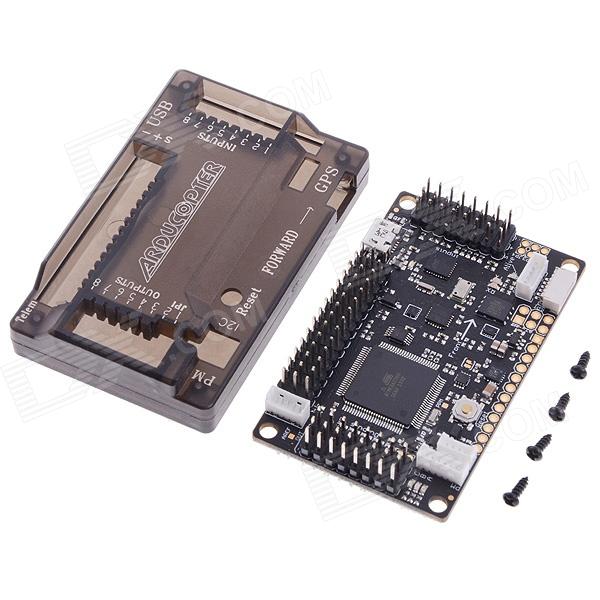
Контроллер
Котроллер полёта с маркировкой APM2.6. Собран на базе Arduino, программируется через USB, содержит в себе гироскоп.
Датчик GPS
Датчик для ардуино GPS с маркировкой 6M. Также содержит в себе компас. Необходим для корректировки полёта.
Регуляторы
Специальное устройство, плавно регулирующих подачу электрического тока на двигатели, в зависимости от команд поступающих от мозгового центра летательного аппарата — полётного контроллера.
Двигатели
4 электрических двигателя. Что про них ещё скажешь?
Бесщёточные. Маркировка 2212 1000KV, хотя пока что она мне мало о чём говорит.
Пропеллеры
4 винта. 2 с загибом для вращения по часовой стрелки, ещё 2 против.
Остальное
Термоусадочные трубки, винтики и прочая мелочь. Среди этого можно отдельно пожалуй выделить штекеры для подключения двигателей. Их использование позволяет делать двигатели легко отсоединяемыми от регуляторов. Это упрощает замену двигателя в случае поломки, а также позволяет быстро поменять полярность неправильно подсоединённому двигателю. Хотя многие владельцы квадрокоптеров предпочитают не пользоваться этими штекерами, а припаивать всё намертво.
Долго ли, коротко ли, сохли выравнивающие слои глянцевого лака, однако время двигаться дальше.
После нескольких слоев глянцевого лака
Для выделения расшивки использовал Accent Panel Line Black от Tamiya. Излишки снимал ватной палочкой, смоченной растворителем для эмалей Tamiya — X-20 Thinner. Акрил выстоял! Read more of this article »
Работы над FW-190 D-9 в масштабе 1\48 продолжаются!
Нанесен замысловатый камуфляж RLM 75-81-82-83. Цвета из палитры Lifecolor. Достоверность цветов оставим на совести производителя. В процессе работы пришел к выводу, что эту марку акрила нужно разводить добавляя меньшее количество растворителя, по сравнению с тем же акрилом от Tamiya. После просушки сняты маски. Read more of this article »
Ох и доставила же Дора мне хлопот при сборке фюзеляжа! И хотя морально я был готов к проблемам при сборке крыла, о чем меня предупреждали, но то, что бы противопожарная переборка вместе с внутренностями не захотела вставать по месту — это стало неприятным сюрпризом. В итоге после многих подгонок и подпилов, оплавления пластика модельным клеем, без применения шпаклевки все-таки не обошлось. Источником излишней ширины внутренностей фюзеляжа, как мне кажется, стала травленая приборная доска, которая оказалась чуть шире, нежели ее пластиковый аналог. А заметил я это во время сухой сборки, поставив козырек фонаря кабины по-месту. А крыло… А крыло после утоньшения задних стенок ниш шасси встало как влитое.
Результат почти двухнедельной борьбы
Затем после маскировки открытых отсеков я приступил к окраске планера. Ввиду отсутствия масштабных шкурочно-шлифовальных работ по планеру, и что бы не залить ажурную клепку и расшивку, в этот раз я решил обойтись без использования грунта.
Прешейдинг по линиям расшивки выполнен XF-1 Black от Tamiya
Полосы принадлежности к JG301 выполнены XF-3 Flat Yellow и XF-7 Flat Red от Tamiya
И вот, настало время для перехода к нанесению основного камуфляжа. Для окраски в цвета стандарта RLM я буду использовать аутентичные акриловые водорастворимые краски фирмы Lifecolor. Первый на очереди — RLM 76
Левый борт FW-190 D-9, окрашенный в RLM 76 от Lifecolor
Преимущества акрила от Lifecolor в первую очередь в том, что пигмент этот краски очень мелкий, и слои краски получаются полупрозрачными и легко контролируемыми. Обратная сторона медали низкая укрывистость и капризность в настройке. Краска после разведения растворителем (не смотря на то, что акрил водорастворимый, для его разведения я использую родной растворитель) любит постоять минут пять-семь для приобретения однородного состава, а факел очень чувствителен к перепадам давления (о меня немного подсекает воздух на манометре ресивера, и в нижнем диапазоне давления эти перепады становятся заметны).
Левый борт FW-190 D-9 и цвета из инструкции
Уже во время подготовки материалов к этой записи, обратил внимание, что при подгонке деталей планера «потерял» несколько линий расшивки. Придется восстанавливать.
Непривычно рано в наших краях в этом году наступили осенние заморозки. И если днем еще радует взор голубая лазурь неба, то быстро темнеющими вечерами все отчетливее пахнет морозом. С каждым разом сложнее и сложнее нащупывать звенящий будильник в темноте еще не распустившегося утра, а рано поседевшая трава и заиндевевшие окна автомобилей уже примеряют на себя зимние уборы. Осень…
Встречайте, модель высотного истребителя Люфтваффе Fokker Wulf FW 190 D-9 в масштабе 1\48 от чешского производителя Eduard!
Longnose Dora
Стоит так же отметить, что «Дора» станет второй моделью из серии из пяти истребителей, заявленных к постройке в рамках Большой Дуэли — 2015.
Несколько слов о прототипе.
С началом налетов на территорию Третьего рейха тяжелых бомбардировщиков союзников, Люфтваффе столкнулось с отсутствием высотного истребителя, способного эффективно противостоять тяжелой бомбардировочной авиации союзников на больших высотах. Fw 190 D по сути это адаптация удачной конструкции Курта Танка Fw-190 A-9 под бомбардировочный двигатель жидкостного охлаждения Jumo 213. Не смотря на то, что работы по проектированию этого самолета начались в 1942-м году, первый серийный образец Fw 190 D-9 облетан лишь 7 сентября 1944 года. Самолет был вооружен двумя крупнокалиберными пулеметами MG 131, установленными над двигателем с боезапасом 450 патронов на ствол, и двух пушек MG 151\20 с боезапасом в 250 выстрелов на ствол, размещенных в корне крыла. Двигатель Junkers Jumo-213А-1 с системой впрыска MW-50 развивал мощность в 2240 л.с., благодаря чему самолет мог разогнаться до 680 км/ч и достичь практического потолка в 10000 метров. Из-за удлинившегося носа самолет и получил свое прозвище — Длинноносая Дора. Всего же было построено от 650 до 700 истребителей серии D.
FW 190 D-9 на полевом аэродроме
Краткое описание набора.
Набор Eduard 8184 представляет собой серию Profipak — помимо литников со 157-ю деталями в коробке находятся плата фототравления с цветными деталям интерьера кабины пилота и окрасочные маски на колеса и фонарь кабины. Так же стоит упомянуть два листа декалей — один с наиподробнейшей техничкой, и второй, с опознавательными знаками под каждый из 6-ти вариантов окраски и маркировки. Каждый снабжен краткой историей, принадлежностью к конкретной эскадрилье конкретной группы с указанием пилота и места базирования. Впрочем, это фирменная отличительная черта наборов от Eduard.
Изюминкой данного набора является возможность открыть для всеобщего обозрения капот с установленными в нем двигателем и пулеметами, а так же пушечные отсеки в корне крыла. Я планирую непременно воспользоваться этой опцией, поскольку внутренняя деталировка открываемых для всеобщего обозрения элементов проработана в пластике весьма и весьма неплохо. Да и открытый капот, лежащий на козырьке фонаря кабины, очень эксклюзивное техническое решение, которое смотрится на мой взгляд просто и эффектно.
Выбор варианта сборки и окраски.
Как уже отмечалось, Eduard предлагает 6 вариантов окраски. Причем прототипы отличаются не только цветами и формой камуфляжа, по и принадлежностью к различным производственным сериям, отличительными чертами которых являются наличие или отсутствие выштамповки на боковой поверхности капота, наличием или отсутствием антенны радиополукомпаса, формой фонарая кабины. Причем этим нюансам уделено внимание в инструкции по сборке. Мне приглянулся прототип А — «белая» 12 с боксарта — одна из Дор второй производственной очереди, попавшая в плен американским войскам в окрестностях аэропорта Bad Langensalza. Фюзеляж окрашивался в RLM 81 и 82, верхние поверхности крыла RLM 75 и 83. Кроме этого, не оставили равнодушным окрашенная в RLM 83 нижняя передняя кромка крыла, и разноцветные элероны. Моттлинг — характерная черта немецкого камуфляжа — присутствует только на киле и руле направления. Таким образом, немного моттлинга плюс широкая палитра камуфляжа (9 цветов!) равно интересная художественная задача.
И не откладывая в долгий ящик делюсь первыми результатами.
Кабина пилота FW 190 D-9
Кокпит сложился без проблем. Из доработок могу указать лишь утоньшение спинки кресла пилота и установку крепежных колец плечевых ремней. К слову, ремни получились подвижные. Кокпит окрашен в Tamiya XF-63 German Grey (максимально близок к RLM 66).
Оружейный отсек и улитка наддува системы впрыска MW-50
Сухая сборка фюзеляжа. Вид сзади
Сухая сборка фюзеляжа. Вид слева
На данном этапе сухая сборка особых проблем и трудностей не выявила. Что весьма и весьма отрадно. Что же, посмотрим что будет дальше!
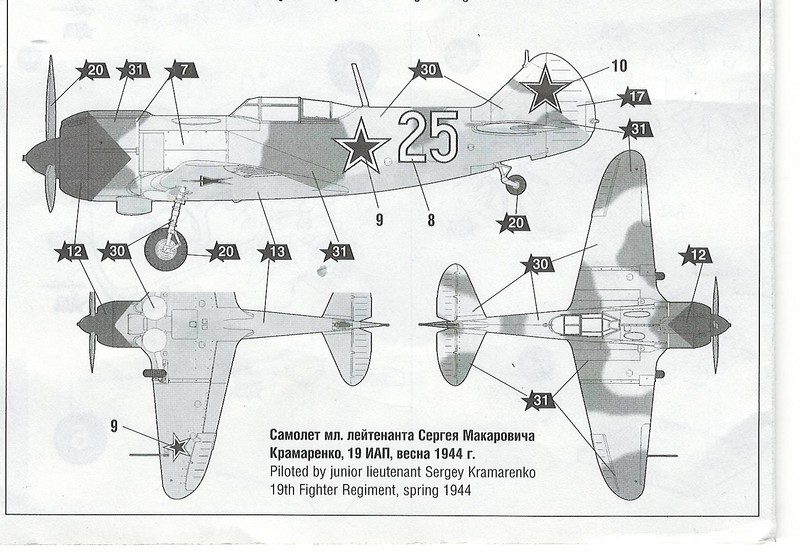
Завершилось строительство моей версии масштабной сборной модели советского истребителя Ла-5 ФН мл.лейтенанта Сергея Макаровича Крамаренко, 19 ИАП, весна 1944г. Врят-ли его можно назвать триумфальным, но все же проект доведен до своего логического завершения. А раз так, то самое время оглянуться назад и подвести некоторые итоги.
Непростая сборка как из-за косяков производителя, так и собственных. В процессе строительства я столкнулся с множеством проблем, как собственноручно созданных (отрезал часть правого крыла выбирая лишний пластик под установку травленого силового набора, что в последствии привело к необходимости шлифовки и выведения клеевого шва, а так же самого стыка травления и пластика), так и любезно предоставленными производителем (утяжины в районе левого борта и искривление фюзеляжа за кабиной). Преодоление этих препятствий потребовала изрядного количества как шпатлевки, так и времени. Навык владения абразивными материалами прокачан однозначно. Однако сухая сборка деталей планера и подробный анализ уже опубликованных строек запросто могли бы сэкономить самый главный и ценный ресурс любого моделиста — время…
Приобретен опыт работы с травлением и масками чешской фирмы Eduard. Травление приятное в работе, чему так же способствовали знания, полученные о циакринакрилатном клее. Самым сложной технологической операцией при работе с травлением явилось внедрение силового набора в пластик крыла. Воистину «Семь раз отмерь — один отрежь». Так же следует отметить бесподобные ремни и приборную доску. И если в интерьере кабины пилота травленые допы очень хорошо способствуют повышению зрелищности и достоверности модели, то внедрение элементов экстерьера потребуют изрядных усилий. И если не ставить себе задачи открытия внутренних отсеков самолета, то можно обойтись и без травления, ограничившись общеприятыми доработками из подручных материалов. Маски же просто порадовали аккуртаностью и точностью. Переплет на фонаре получился.
Секрет смывки так и остался для меня секретом. Смывка откровенно не удалась. На сей раз я решил попробовать эмаль Humbrol на уайт-спирите Tikkurilla 1030. Раствор получился короткоживущим из-за повышенной летучести этой марки уайт-спирита. Смывка неохотно растекалась по пазам и линиям расшивки (хотя тут возможно сказалась недостаточная глубина этих самых линий из-за значительного объема шлифовальных работ). Возможно для того, что бы уловить суть процесса, воспользуюсь готовыми решениями именитых производителей.
А вот освоенный метод переноса контуров камуфляжа при помощи самодельных масок из кальки однозначно порадовал. Простота, доступность и удовлетворительная точность — основные достоинства метода. Недостатки же будут невелированы с накоплением опыта применения.
Ошибки, вызванные собственной общей невнимательностью. Особенности характера, которые нужно корректировать. Собственно, данный блог и есть попытка структурировать и систематизировать процесс строительства моделей. Так же стоит наверное более тщательно подходить к процессу планирования как самих технологических операций, так и их последовательности.
Но в целом, как говориться, отдохнул неплохо! Получен как опыт, так и удовольствие от самого процесса, а так же удовлетворение от его завершения. А не это ли и есть пресловутый модельный фан, а?
Ну а теперь немного фотографий. Более подробно отфографирую модель в Модельной полке. Да и проект лайткуба уже практически готов.
Спасибо за внимание!
модель Ла-5 ФН мл.лейтенанта Сергея Макаровича Крамаренко, 19 ИАП, весна 1944г.
Ла-5 ФН. Имитация трубки Пито — игла, тросы антенны — волосы от одной из кукол дочки
Ла-5 ФН. Вид сверху. Форма пятен определенно удалась
Модель Ла-5 ФН Вид снизу. Виден силовой набор и выпущенные закрылки.
Задача масштабирование схем окраски модели возникает практически сразу после выбора прототипа и ставит своей целью достижение максимального сходства и исторической достоверности модели. Форма и расположение камуфляжных пятен является плодом работы целых институтов, разрабатывающие стандарты окраски техники для снижения ее заметности. Поэтому камуфляж, сделанный «на глаз», может отрицательно сказаться на общей оценке модели в глазах искушенного зрителя.
Опробовав несколько способов нанесения камуфляжа, неоднократно описанных в Сети, для себя я выработал метод, который и собираюсь Вам продемонстрировать Read more of this article »
Прешейдинг… Сколько копий сломано на различных модельных ресурсах о целесобразности и необходимости его применения. Кто-то считает предварительное затемнение рельефных участков простой данью модельной моды, а кто-то чуть ли не фундаментом процесса окрашивания, тем базисом, который и определит уровень и качество окончательного исполнения модели… Классический вариант этой техники, насколько я себе представляю в данный момент, есть окраска рельефа на модели в черный цвет и последующее нанесение основных цветов полупрозрачными слоями таким образом, что бы выделенные черным участки оказались темнее нежели незатемненные участки на модели. Если удастся уловить эту тонкую грань, то расшивка, лючки да прочие заклепки не сольются с основным цветом и модель не будет выглядеть «плоско».
Кроме того, нужно понимать, что прешейдинг — это всего лишь одна из многих техник придания реалистичности и зрелищности модели. Освоение этой техники процесс интересный, и я нахожусь лишь в начале этого пути.
Итак, прежде чем наносить основные цвета на загрунтованную модель советского истребителя Ла-5 ФН, черным матовым цветом из акриловой палитры Tamiya XF-1 Flat Black из аэрографа я щедро широким факелом прошелся по всем выступающим и впадающим местам планера.
Прешейдинг. Вид сверху
Прешейдинг. Вид снизу
Процесс происходил при давлении 1,2 атм и жидко разведенной краске (краска сбегала с кисти №3 из волос пони практически не собираясь в капли). Чем еще хорош прешейдинг, так а это тем, что позволяет относительно безболезненно восстановить навыки работы с аэрографом.
Наступила очередь основного цвета нижних поверхностей, в качестве которого я решил сначала использовать XF-23 Light Blue от Тамии. Результат меня разачаровал.
Чистый XF-23 Light Blue. Правая плоскость
Как видно на фото, прешейдинг получился практически закрашенным, да и цвет лишь отдаленно напоминает AMT-7, на мой взгляд слишком он уж ушел в серый. Плюс вылезли некоторые нюансы в сборке (забыл убрать стыковочный шов деталей на законцовках консолей крыла) и огрехи шлифовки, поэтому я без сожаления прошелся по слою краски наждачной бумагой 2000-й зернистости в мыльной воде, дабы извести недостатки и подготовиться к нанесению нового слоя краски.
Теперь я решился скорректировать немного базовый цвет XF-23 Light Blue добавив в него несколько капель XF-2 Flat White в пропорции примерно 4:1. Краску развел жидко, давление снизил до 0,9.
XF-23 Light Blue + XF-2 Flat White в пропорции 4:1
Вышло лучше, почти то что я хотел, но на мой взгляд, не хватает лазури, именно той, небесной, да и снова косячки шлифовки на законцовках консолей проявились.
Снова шлифовка и сушка планера. На сей раз я решил замешать цвет более радикально по формуле XF-23 Light Blue + XF-2 Flat White + XF-4 Blue в пропорции примерно 4:1:1. Результат на фото.
XF-23 Light Blue + XF-2 Flat White + XF-4 Blue в пропорции примерно 4:1:1. Вид нижней плоскости со стороны капота
XF-23 Light Blue + XF-2 Flat White + XF-4 Blue в пропорции примерно 4:1:1. Вид нижней плоскости со стороны хвоста
Tamiya XF-23 Light Blue, XF-4 Blue , XF-2 Flat White
Цвет, получившийся в результате, меня удовлетворил. Он больше похож на АМТ-7, да и рельеф стяжных лент крепления крыла, провисы полотна на элеронах и место крепления трубки Пито стали видны гораздо четче, нежели это было в начале. Однако лючки практически потерялись, что и не мудрено, так как постоянная шлифовка и покраска сгладили рельеф. Надеюсь, мне удастся восстановить его в последующем при помощи смывок и сухой кисти.
Подготовка модели к окраске… А если за окном светит солнце и поют птицы?
Лето… Когда-то давно, в счастливом босоногом детстве, лето казалось чем-то необъятным и бесконечным, оно вмещало в себя огромную череду эмоций и событий, которых с лихвой хватало на многочисленные сочинения на тему «Как я провел лето». Теперь же, в офисной производственной суете, лето напоминает скоростной пассажирский поезд, который проносится с шумом мимо полустанка, на перроне которого стоишь, дышишь воздухом, разгоняемым составом, и думаешь о том, как бы успеть, хоть чуть-чуть ухватить волшебства под названием Лето…
Неспешно продолжаются работы над масштабной сборной моделью советского истребителя Ла-5ФН в масштабе 1\48. В принципе, работы и не прекращались ни на неделю, но из-за незначительности результатов частые апдейты решил не постить, дабы не засорять эфир по мелочам. И вот, собрав материала не небольшую статью, спешу поделиться сделанным.
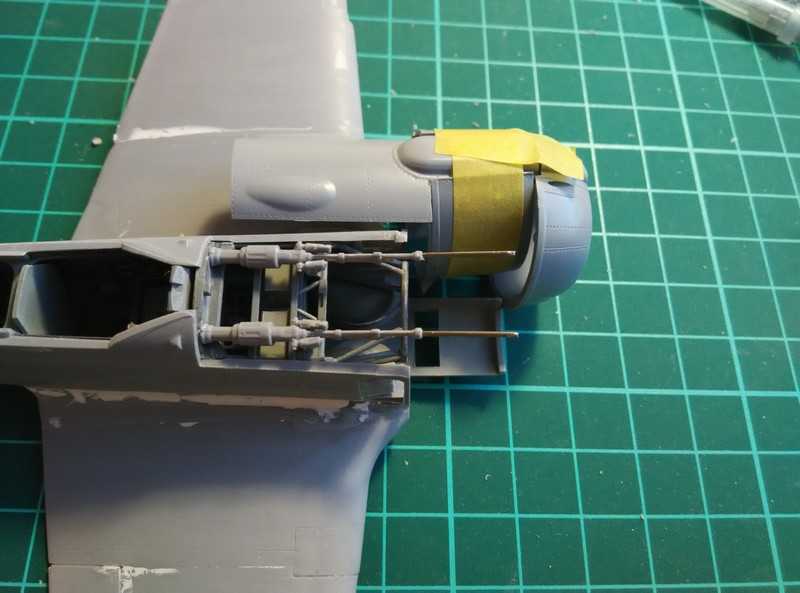
Итак, после неудачной примерки пушек, и внимательного изучения инструкции, предлагаемой производителем, а так же небольшого серфинга по просторам интернета, мне окончательно стало понятно, что без выборки излишней толщины пластика,закрыть капоты с установленными пушками не получится. Последовавшее решение отказаться от установки начинки подкапотного пространства мне кажется совершенно понятным и естественным, так как после войны с фюзеляжем возиться еще и с обточкой капотов, да и еще что бы потом этого всего не было бы видно зрителю, все-таки это неоправданное увеличение итак растущих как на дрожжах трудозатрат. В роли суслика который есть пусть выступят сымитированные тандеры в кабине пилота, пока мне этого достаточно.
Примерка пушек и капотов. Видна недостаточная длина стволов
Сюрпризом не стало неточное прилегание капотов. Щели, возникшие при этом, были устранены при помощи вставок из тянутого литника, модельного клея и наждачной бумаги 800-й зернистости.
Маскировка фонаря кабины пилота масками из BigED затруднений не вызвала, впрочем как и установка оного на фюзеляж. Единственное, что хочется отметить, так это материал, и которого изготовлены маски — по фактуре он похож на тамиевский скотч, а следовательно склонен к растягиванию и имеет бархатистые края на срезах, а следовательно чуть более сложен в работе, нежели маски от того же самого Hobby+. Но это сугубо личное мнение.
Конечно, столь многочисленное воздействие абразивных материалов на планер практически напрочь лишило его не только имитации заклепок, но и рельефа жаропрочных панелей и стягивающих лент. Для восстановления столь заметных деталей самолета и решил использовать фольгу-самоклейку, которую с легкостью можно найти на развалах строительных рынков и полках строительных же супермаркетов.
На основе распечатанных масштабных чертежей самолета, взятых из одноименного номера журнала «Война в воздухе», изготовил шаблоны, по которым и вырезал детали из фольги. После снятия защитной пленки и приклеивания вырезанных деталей по месту, разглаживал фольгу ватной палочкой до образования ровной гладкой поверхности. Осмотрев результат придирчивым взглядом, понял, что фольга несколько толстовата. Эту проблему я решил сняв лишнюю толщину наждачной бумагой 2000-й зернистости. Ей же выровнял складки и морщинки, образовавшиеся на зализе.
Имитация при помощи фольги ленты крепления центроплана и правой консоли крыла
Имитация при помощи фольги ленты крепления центроплана и левой консоли крыла
Имитация жаропрочных панелей при помощи фольги-самоклейки
Затем был замаскирован кокпит и планер отправился в ванну, для купания в теплой мыльной воде.
После водных процедур и устранения явных косяков (дополнительной заделки потребовали места сопряжения травленого силового набора крыла и пластика консоли), установил травленые створки капота.
Установленные травленые створки капота
Наконец на модельном столе стало появляться нечто, напоминающее легендарный истребитель!
И вот пришла долгожданная пора для того, что бы дрогнули стрелки манометров, да разогналось масло по компрессору — модель можно грунтовать!
Не могу скатать, что я использую грунт каждый раз перед покраской, отнюдь. Все зависит от процесса сборки. Если он вызывал трудности и был сопряжен со множеством доводочных работ — то грунт просто необходим. Только благодаря использованию грунтовки на этой стадии, до перехода к непосредственно покраске модели, можно выявить недостатки сборки и шлифовки, а так же практически безболезненно устранить их. Фотографирование, внимательность и терпение — вот та птица-тройка, которая способна вынести строительство модели на следующий этап.
Tamiya Liquid Surface Primer White и результат его работы
Четко видно что данное место требует дополнительной обработки
В качестве грунта я использовал разведенный старым добрым нафтановским 647-м растворителем до состояния нежирного молока Liquid Surface Primer White от Tamiya. Наносил на модель при помощи аэрографа с диаметром сопла 0,3 при рабочем давлении около 2 bar. При таких параметрах толщина слоя грунта легко контролируется, а в при необходимости заполнения пустот легко сделать лужу управляемого размера именно в нужном месте. После просушки слоя и внимательного осмотра проблемных мест, устранял выявленные недостатки — все-таки белый цвет отлично подчеркивает огрехи сборки — и проводил шлифовку наждачной бумагой 2500-й зернистости с водой. Всего мне понадобилось 4-ре цикла грунт-шлифовка-просушка для достижения удовлетворившего меня результата.
Так выглядит модель после зачистки недостатков в мыльной воде
Настал черед для восстановления имитации заклепок.
Rivet-R Mini RB-T010
Для решения этой задачи я использовал — не побоюсь этого слова — замечательный инструмент — Rivet-R Mini RB-T010 с колесом с шагом зубъев в 1 мм от RB Productions. Очень удобный в обращении инструмент! Идущие в комплекте колеса с межзубным расстоянием от 0,5 до 1,5 мм с шагом 0,25 придают инструменту небывалую универсальность во всех ходовых масштабах. Сложностей в накатке не возникло, даже не смотря на то, что я впервые держал его в руках. Накатка проходила в режиме Поставил — Прицелился — Прокатил. Единственное место, где возникла сложность — так это при накатке вертикальных рядов на жаропрочных панелях на зализе. Диаметр колеса не позволил довести ряды до стыка крыла и фюзеляжа. На горизонтальных поверхностях — повторюсь — сложностей не возникло.
«Лавка» под грунтом. Вид сверху. (кликабельно)
«Лавка» под грунтом. Вид снизу. (кликабельно)
На этом считаю подготовку модели советского истребителя ВОВ Ла-5 ФН к покраске завершенной.
Пока собираются секунданты да устанавливаются барьеры, небольшое продолжение строительства модели истребителя Ла-5 ФН в 48-м масштабе от Звезды.
Практически без приключений собрано и установлено хвостовое оперение. В триммере руля направление сверлом диаметром 0,5 мм высверлил отверстие под последующую установку хвостового огня. Хотелось бы обратить внимание всех собирающих данную модель на тот факт, что согласно документации триммер руля высоты устанавливается в левом стабилизаторе по направлению полета. Производитель в инструкции тактично обошел этот момент.
Хвостовое оперение. Отверстие под ходовой огонь немного не в фокусе
После установки предкрылок, я решил собрать пушки. И не просто собрать, а немного доработать. Для чего была срезана пластиковая часть ствола и заменена на соответствующей длины иглу.
Иглы для имитации стволов
Но во время примерки я с ужасом обнаружил, что длина получившихся таким образом стволов недостаточна для эффектного появления жерла орудий в предназначенных для них портах капота. А получилось так почему? Потому, что снова я поверил производителю, не проверив длину деталей по месту. Так что стволы придется переделать (благо покрасить не успел — было бы вдвойне обидно). Но и короткие стволы не пропадут — из них я планирую изготовить штоки цилиндров на стойках шасси.
Примерка пушек и капотов. Видна недостаточная длина стволов
Прошла неделя с того момента, как искривление хвостовой части фюзеляжа повергло меня в практически бескрайнюю пучину уныния. Много было порвано одежд и изведено пепла… Даже был найден донор для новых деталей планера — спасибо другу и товарищу Вадиму, поддержавшему меня в этой не простой ситуации.
Поэтому, стиснув зубы, я решил продолжать!
Первым этапом работ стала расклейка фюзеляжа. Здесь как никогда пригодился сверхтекучий клей Tamiya. Действовал я следующим образом: кисточкой обильно смазывал застывший клевой шов и ждал момента, когда клей сделает шов пластичным. Минут через семь лезвием ножа уже можно было проникнуть в размягший шов и разделить склеенные половинки фюзеляжа. Потом, после полного высыхания клея, наждачной бумагой 800-й зернистости я зачистил стыковочные части деталей, вернув им былую гладкость.
Теперь сборку можно было повторять. Однако учитывая прошлый негативный опыт, сделал я стыковку на этот раз насухую — зафиксировав детали незаменимым модельным скотчем от фирмы Tamiya.
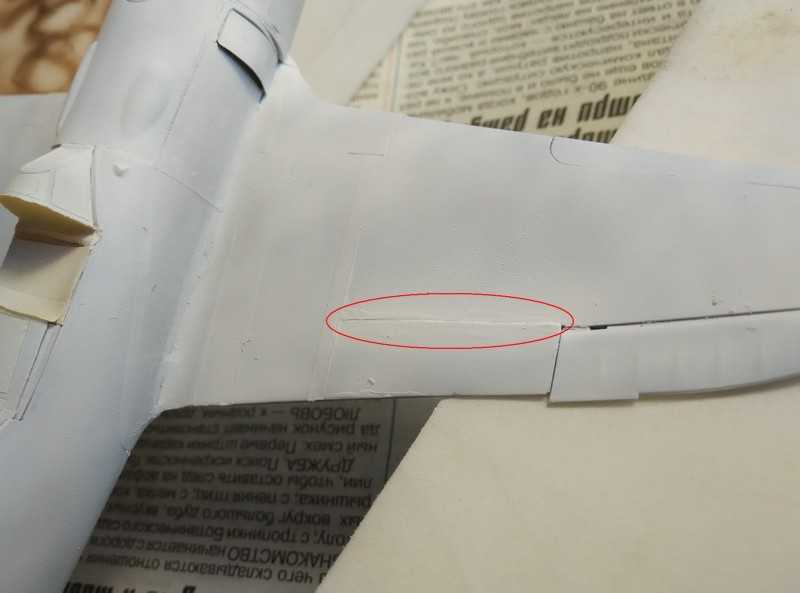
Расхождение шва нижнего стыка половинок фюзеляжа
Итак, как я думаю, проблема была найдена — ближе к стыку крыла и фюзеляжа детали не сходились по предварительной оценке миллиметра на полтора — и ее нужно было решать. Листового пластика нужной толщины как на зло не оказалось, поэтому я при помощи натфеля вытачивал прямоугольные кусочки нужной толщины из обрезков литника и подгонял их по месту. Затем обильно пролив таким образом заделанный шов модельным клеем, зафиксировал нижний стык половинок фюзеляжа.
Тот же шов, но с уже вставленными кусочками полистирола
Верхний стык так же не сошелся, но не столь критично. С ним оказалось проще — я просто обильно пролил его циакрином. После высыхания клея, в мыльном водяном растворе, я произвел шлифовку клеевых швов при помощи палочек для полировки ногтей, чередуя зернистость по возрастанию (400-800-1200-2000). Мелкозернистая структура палочек вместе со скользящими свойствами мыльного раствора способствуют полировке шлифуемой поверхности, защищая ее от пыли и царапин (на мой взгляд, конечно же).
Затем процедура сборки фюзеляжа была повторена. По мере высыхания клея все пристальней и внимательней приглядывался я к полученному результату. И если под одним ракурсом мне виделся идеально ровный хвост, то под другим складывалось ощущение что он предательски изгибается как у силиконовой рыбки… Но сделанные фото и мнение независимых экспертов (привлек дражайшую супругу) все-таки убедили меня в том что операция удалась…
Сборка насухо, вид сверху
Сборка насухую, вид снизу. Обратите внимание на снятые травленые детали
Но работа над ошибками еще не закончена! Впереди обработка стыков крыла и фюзеляжа и установка хвостового оперения!
Пользуясь случаем дополнительно установил тяги от педалей к рулю направления
Примерка капотов на снятом двигателе серъезных проблем не выявила
Объект последующего пристального внимания. Так же можно оценить качество шлифовки клеевого шва.